Originating from Italy, I am currently based in Zurich to pursue my interests in Robotics, which is my lifelong passion. I am currently at my second year of the MSc in Robotics, Systems and Control and my interests lie mainly in Computer Vision, Autonomous Driving, Machine Learning/Deep Learning and Robot Navigation.
I am currently studying for my Master in Robotics, Systems and Control at ETH Zürich. Main focus on Computer Vision, Machine Learning and Robot Navigation.
from Sep. 2020Teaching assistant under the Rehabilitation Engineering Laboratory, directing exercise lessons for the course "Physical Human-Robot Interaction".
from Sep. 2021Graduated with honors in Automation Engineering at Alma Mater Studiorum - University of Bologna. Main focus on Control theory, Robotics, Mechanics and Electronics.
Sep. 2017 - July 2020I spent the whole second year of my Bachelor's degree in Shanghai, where I had the opportunity to challenge myself with a brand-new environment and interact with brilliant students coming from all over the world, which was incredibly stimulating from both a personal and academic point of view.
Sep. 2018 - July 2019Graduated with honors at Liceo Scientifico F. Quercia, Caserta, Italy. Main focus on scientific subjects like Maths, Physics, Chemistry and Biology.
Sep. 2012 - July 2017Took part in a student exchange program of 5 months while I was attending the second year of my High school studies. I was hosted by an exchange family and I attended the local school and followed lectures together with the local Irish students.
Jan. 2014 - May 2014
Semester Project with the Robotics and Perception Group (RPG), under the supervision of Professor Davide Scaramuzza and the PhD students Daniel Gehrig and Mathias Gehrig. The goal of the project is to design a learning-based solution that converts any existing video dataset recorded with conventional cameras to synthetic event data, using Spiking Neural Networks, which process information conveyed as temporal spikes.

Mixed Reality course project, ETH Zürich (Fall 2021). The goal of the project is to develop an intuitive mixed reality interface on a Microsoft Hololens 2, with which the user should be able to remotely control a robot arm and perform basic assembly tasks using hand and eye tracking. The project requires the use of C#/Unity/MRTK for interfacing with the HL2, ROS for tele-communicating with the physical robot and OpenCV for estimating objects poses in the physical environment and mapping them to the MR environment of the user.

3D Vision course project, ETH Zürich (Spring 2021). The project was supervised by Google Research Interns. The goal of this project is to use an online adaptation module to overcome the domain shift issue in dense reconstruction and build a fully differentiable SLAM pipeline that can be optimized End-2-End.
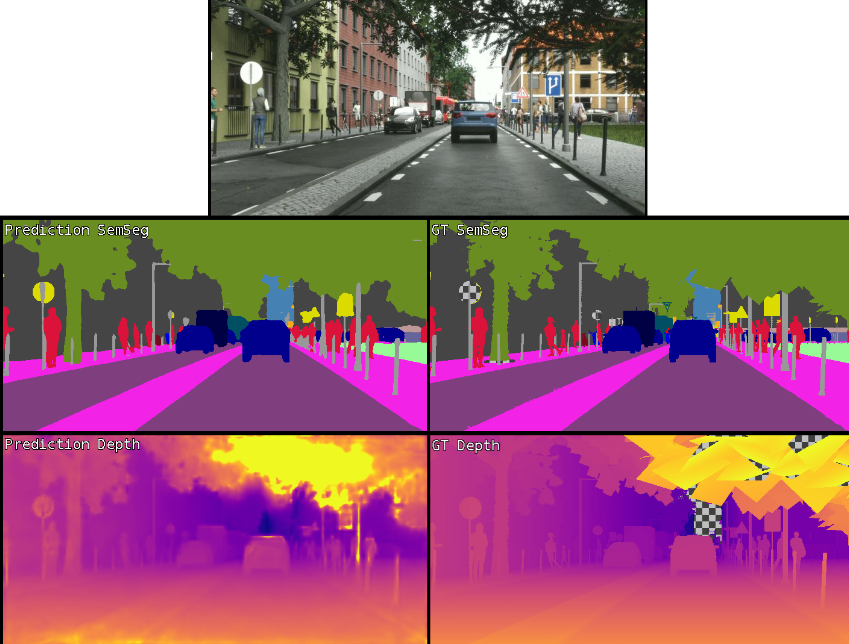
Deep Learning for Autonomous Driving course project, ETH Zürich (Spring 2021). The goal of the project is to build Multi-Task Learning (MTL) architectures for dense prediction tasks, i.e. semantic segmentation and monocular depth estimation in autonomous driving scenes, exploiting joint architectures, branched architectures, and task distillation.
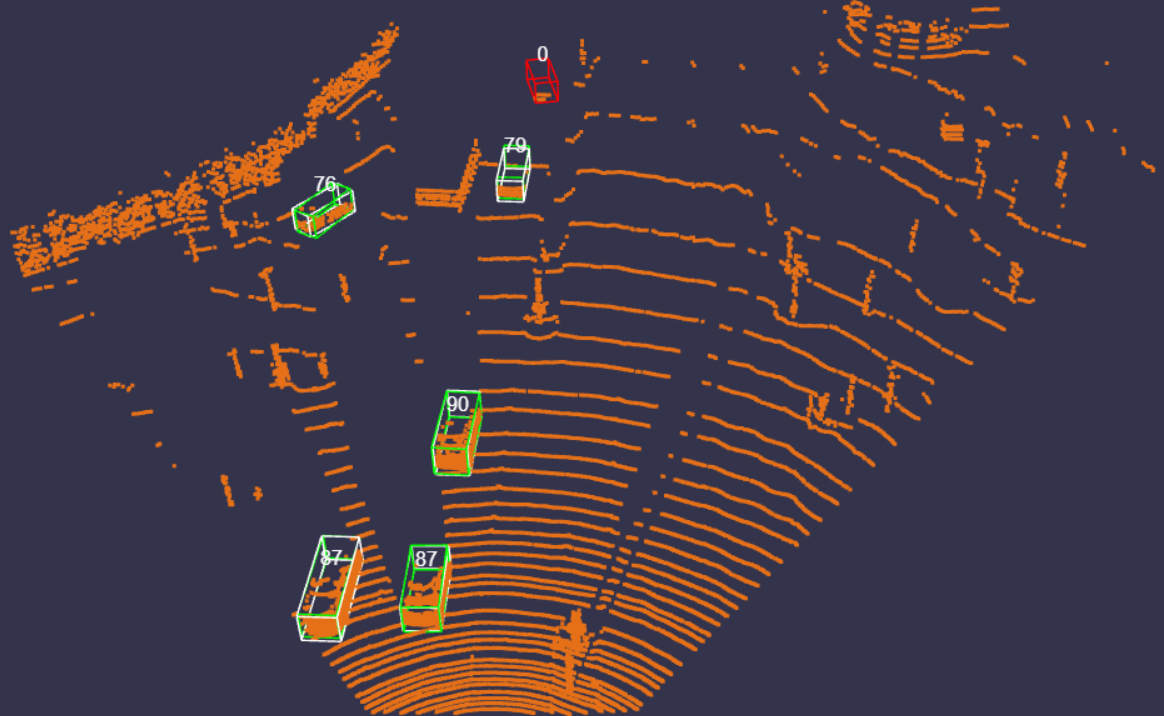
Deep Learning for Autonomous Driving course project, ETH Zürich (Spring 2021). The goal of the project is to build a 2-stage 3D object detector to detect vehicles in autonomous driving scenes, i.e. drawing 3D bounding boxes around each vehicle. Irregular 3D point cloud data are exploited to detect vehicles.

Virtual Reality I course project, ETH Zürich (Spring 2021). The project consists in the implementation of a skateboarding game using Unity3D and Blender. The game contains different levels with increasing difficulty and the whole level design is implemented in C# with Unity interface. All the assets and animations were modeled on Blender.

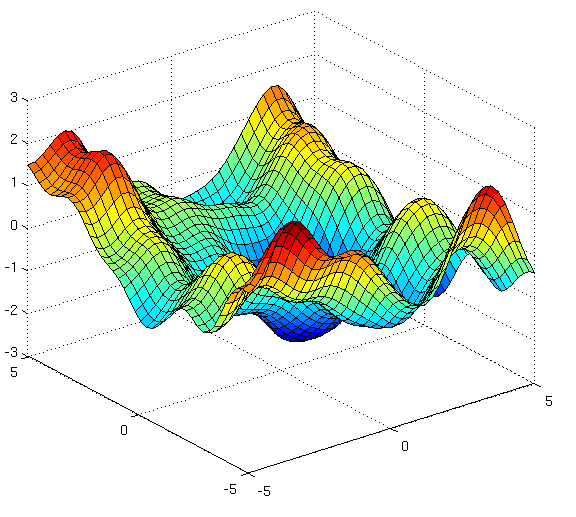
Probabilistic Artificial Intelligence course projects, ETH Zürich (Fall 2020). The assigned projects are the following (1) Gaussian Process Regression for ground-water pollution prediction. (2) Predicting uncertainty with Bayesian Neural Networks on MNIST dataset. (3) Hyperparameter tuning with constrained Bayesian optimization. (4) Actor Critic Reinforcement Learning (LunarLander-v2 OpenAI Gym).
Computer Vision course projects, ETH Zürich (Fall 2020). The topics covered in the projects are the following (1) Camera Calibration. (2) Harris Corner Detector and Features Matching. (3) Particle Filter and Monte Carlo Localization. (4) Model Fitting and Multiple View Geometry. (5) Image Segmentation. (6) Stereo Matching. (7) Structure from Motion. (8) Shape Context and Shape Matching. (9) Condensation Tracker. (10) Image Categorization.
GitHub
© 2022 ivan_alberico